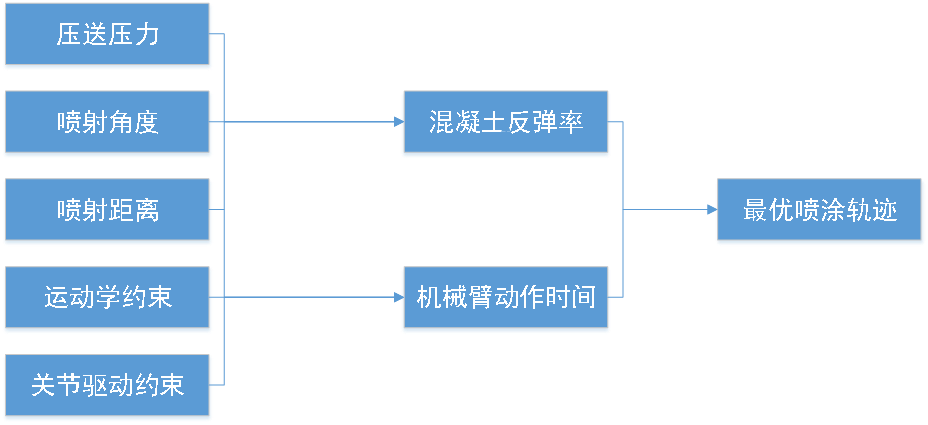
本项目拟开展以下几方面重点研究:复杂多变大空间隧道环境扫描建模技术、约束多目标的轨迹规划技术、非线性强耦合多关节机械臂控制及振动抑制技术、受限通道下设备远程监控管理技术。提出结合施工工况的基于法向偏差的点云去噪与基于三角剖分的孔洞修复算法,克服粉尘、潮湿、振动等恶劣工况对传感器扫描建模的影响;采用多种点云搜索、点云特征提取与分割的组合方法,识别出施工中隧道表面存在的拱架、防护网、超欠挖等多种特征结构,自适应调整喷浆模式;将隧道喷浆任务建模成作业时间-回弹率多目标优化问题,采用基于多策略排序变异的多目标差分进化算法求解最优喷涂轨迹,以最高效率和最低损耗量完成隧道面的喷涂作业;提出一种基于双模糊自适应控制的滑模控制方法,具有调整时间短,轨迹跟踪精度高,鲁棒性强等优点;提出一种基于大扰动大时滞条件下的前馈-反馈控制器设计方法,建立臂架所受干扰力的估计器,解决湿喷机在作业过程中由于负载的变化和外界的干扰以及自身运动特性等引起的的臂架振动和末端晃动问题。
自主智能喷射围绕两大核心任务展开: