手术机器人控制系统设计
|
项目简介
手术机器人是一种高级机器人平台,其设计的理念是通过使用微创的方法,实施复杂的外科手术。手术机器人操作采用主从控制方式,医生在双目内窥镜与三维显示系统的帮助下观察病人腹腔内的图像,在嵌入式实时控制系统的控制下,以1000Hz的控制周期实现“异构”的主操作手与从操作手之间的主从映射。

手术机器人系统工作原理示意图
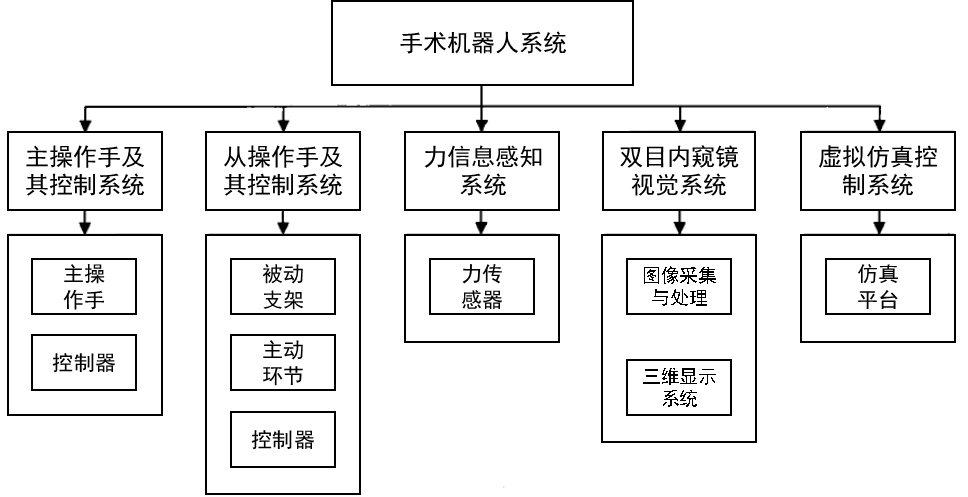
手术机器人系统结构示意图
主操作手及其控制系统
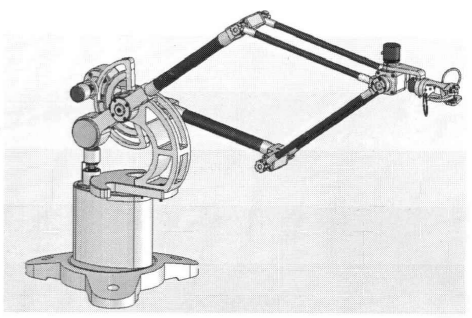
主操作手是医生与机器人的交互接口,医生通过主操作手控制末端工具完成手术任务。
主操作手机构简图
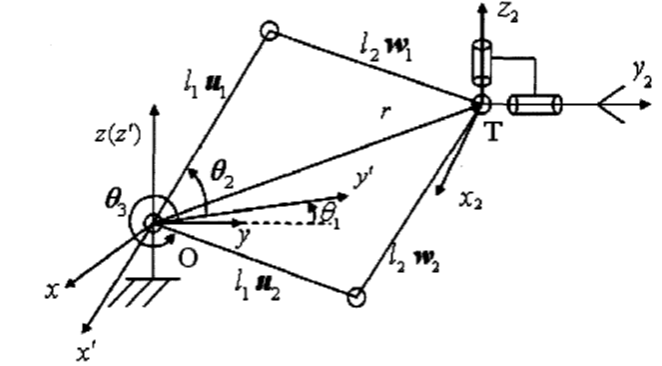
主操作手空间坐标系
从操作手及其控制系统
在医生进行主从操作过程中,从操作手在主操作手的控制下完成动作。根据不同手术的需要,主从运动映射的比例需要改变,因此主从操作比例系数需要能够调节。
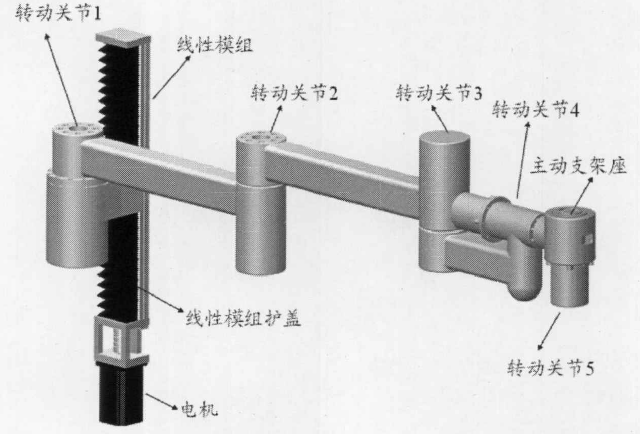
从操作手的被动支架机构简图
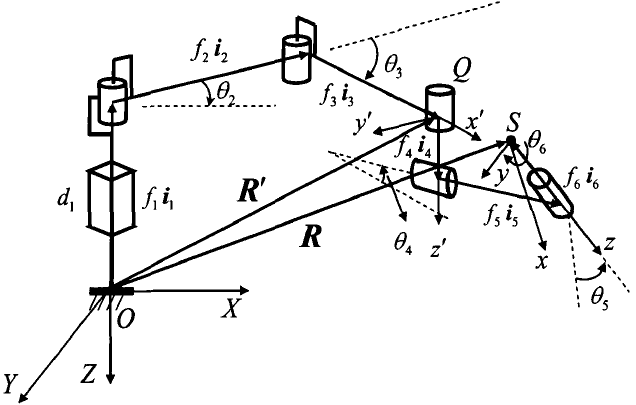
从操作手被动支架空间坐标系
力信息感知系统
在手术过程中,仅有的内窥镜视觉信息还不足以保证手术的安全性,医生在进行手术中由于缺乏力反馈信息,往往会导致医疗事故发生。力反馈信息是通过夹持钳末端的传感装置获得的,将信息传递到中控机通过预定的算法将检测的反馈信息换算成反馈到主手的力矩信息,最后通过安装在主操作手上的反馈电机对主操作医师进行反馈力的实施。

内窥镜机构简图
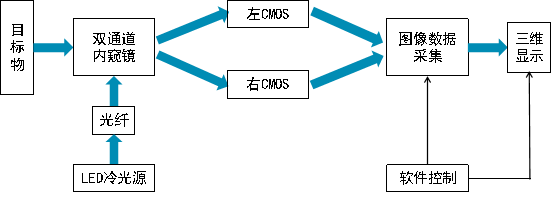
三维内窥镜系统结构框图
虚拟仿真训练系统
虚拟现实技术是通过视觉、听觉、力觉、触觉等传感器及相应的建模技术和设备为受训者提供了一个虚拟环境的接口,通过该接口实现人与虚拟环境的互动,实现虚拟的微创手术操作训练过程。
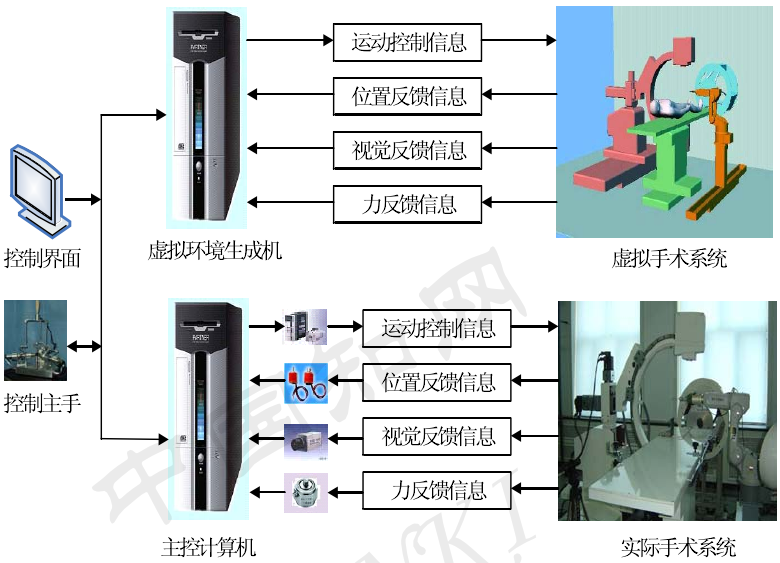
虚拟手术系统与实际手术系统对比
|
版权声明
请尊重我们的原创作品,转载时请标注文章的原始出处和作者信息。如果您有任何问题或想法想和我们进行沟通,
请您使用页面下方的邮件或电话进行联系。
|
|