一、项目研究内容与目标
1.1项目简介
本项目融合“人工智能焊接质量识别”、“机器视觉焊缝重构寻位”、“焊工手法运控复现”、“工业互联网”等一系列先进的智能算法、
传感控制和信息通讯技术,将现有机器人焊接装备进行了一轮重大的进化升级,使之成为懂工艺、懂质量、懂生产的智能焊接机器人。
本项目将彻底改变焊接机器人的工作流程和调节方式,真正做到每一条焊缝都有据可依,有理可循,让每一条焊缝都出自“高级焊工之手”。
1.2研究目的
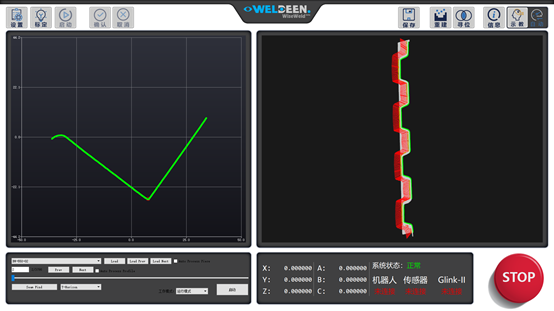
研发一套包含焊缝识别,轨迹规划,轨迹跟踪控制的全自动焊接系统,并用于实际工业环境中。
1.3研究意义
目前,机器人的焊接工作都是基于人工示教编程进行的,焊接质量的优劣完全依靠工程师的调试水平和工件的预制状态,导致优化方法效果不佳、焊接质量不可控、系统稳定性难以预测等一系列问题,且焊接环境十分恶劣,伴随着大量的粉尘、噪音和火花,
对工人的身体带来了很大的伤害,本项目对提升焊接质量,提高作业效率及保护工人身体健康,解放生产力有着重大意义。
|