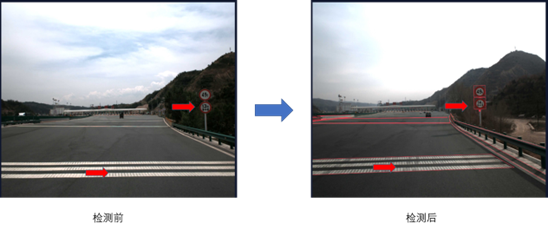
该项目旨在交通部运输部《数字交通“十四五”发展规划》背景下,利用深度学习技术实现公路基础设施全要素全周期数字化,公路建设施工及养护智能化,保证公路资产信息数据真实、准确、完整。利用车载单目摄像头进行公路信息采集,通过目标检测和跟踪技术实现整条公路交通安全设施信息数字化(交通指示牌,护栏,地标,杆件,电子设施等);通过单目深度估计技术实现交通安全设施在经纬度位置计算,不合规或故障的交通安全设施的识别,达到公路施工及养护的智能化;通过鸟瞰图转换和图像拼接技术实现高精地图的构建;最后将公路交通安全设施添加到高精地图上面,在路端方向为公路管理者提供最优质的公路基础设施数字化数据服务及解决方案,在车端方向为自动驾驶方案提供最优质的高精度地图数据服务。