自主探索创新项目
AIRLab王清锋同学获批2023年度研究生自主探索创新项目
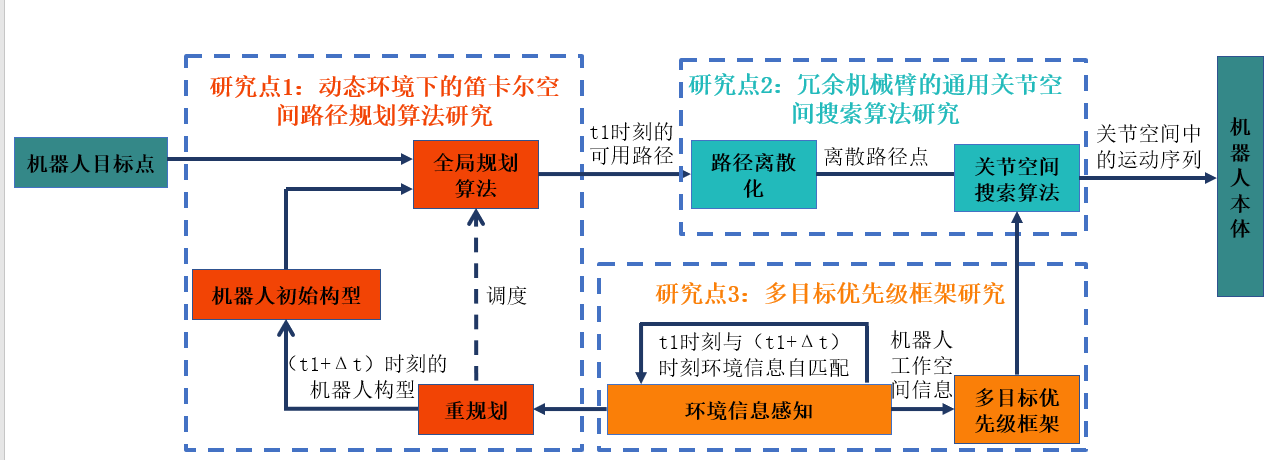
近日,2023年度中南大学研究生自主探索创新项目评审结果揭晓,人工智能与机器人实验室(AIRLab)王清锋同学申请的《动态环境下冗余机器人通用实时运动规划框架研究》项目获批立项,获得6000元经费资助。 项目针对冗余机器人运动学和运动规划进行研究,拟开发一个能在动态环境下对冗余机器人进行实时运动规划的通用框架。相比传统机器人,冗余机器人通过增加自由度,可以满足更多的运动约束,如避障、避奇异、保持连续性等,从而完成更复杂的作业任务。然而,冗余机器人的逆运动学求解面临着挑战。传统的数值解法难以应用于复杂结构的冗余臂,而且其逆解的组合往往是无穷的,难以保证整体轨迹的平滑性。为了解决这个问题,项目提出了一种参数化+搜索算法的通用求解框架,用于处理冗余机器人的路径逆运动学问题。该框架将关节分为参数化和非参数化两部分,通过解流形的分布选择最优的参数化关节配置,将参数化关节的数值解和非参数化关节的解析解进行组合,以多目标优化的思路求解指定路径的最优逆解序列。这种方法解决了原有全关节编码决策变量维度高、求解时间长的问题,具有推广应用于各类冗余机器人的路径逆运动学求解的潜力。
项目研究框架
冗余机器人路径逆运动学通用求解框架
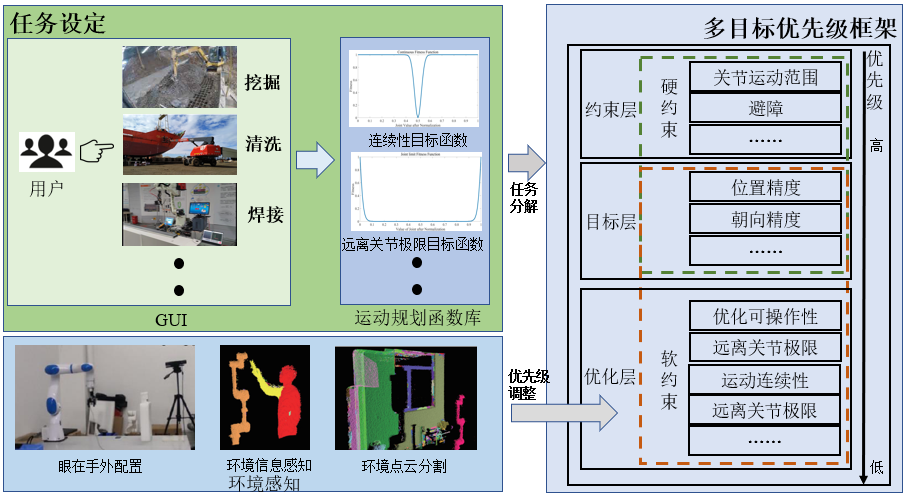
面向作业任务的多目标优先级框架