RA-L
恭喜实验室吴迪论文被RA-L接收
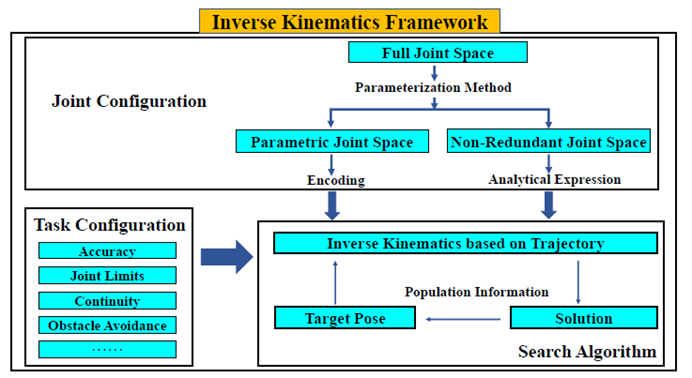
实验室吴迪同学在以前研究的基础上对冗余串联机器人的逆运动学求解框架进行了深一步研究,提出了包括运动学配置,任务分解与配置和搜索算法三个部分的逆运动学求解框架。另外,就针对一款八自由度机器人隧道喷涂问题提出了针对性的搜索算法T-IK。相关研究形成论文’T-IK: An Efficient Multi-Objective Evolutionary Algorithm for Analytical Inverse Kinematics of Redundant Manipulator’已经被RA-L期刊收录并在线发表,DOI: 10.1109/LRA.2021.3108550.

Robotics and Automation Letter(RA-L)于2015年6月1日由机器人与自动化协会(RAS)发布。该期刊的范围是发表同行评审文章,及时、简明地介绍创新的研究思路和应用结果,报告机器人和自动化领域的重要理论发现和应用案例研究,2020年最新IF为3.74.