ICRA2023
恭喜实验室王清锋论文被ICRA2023接收
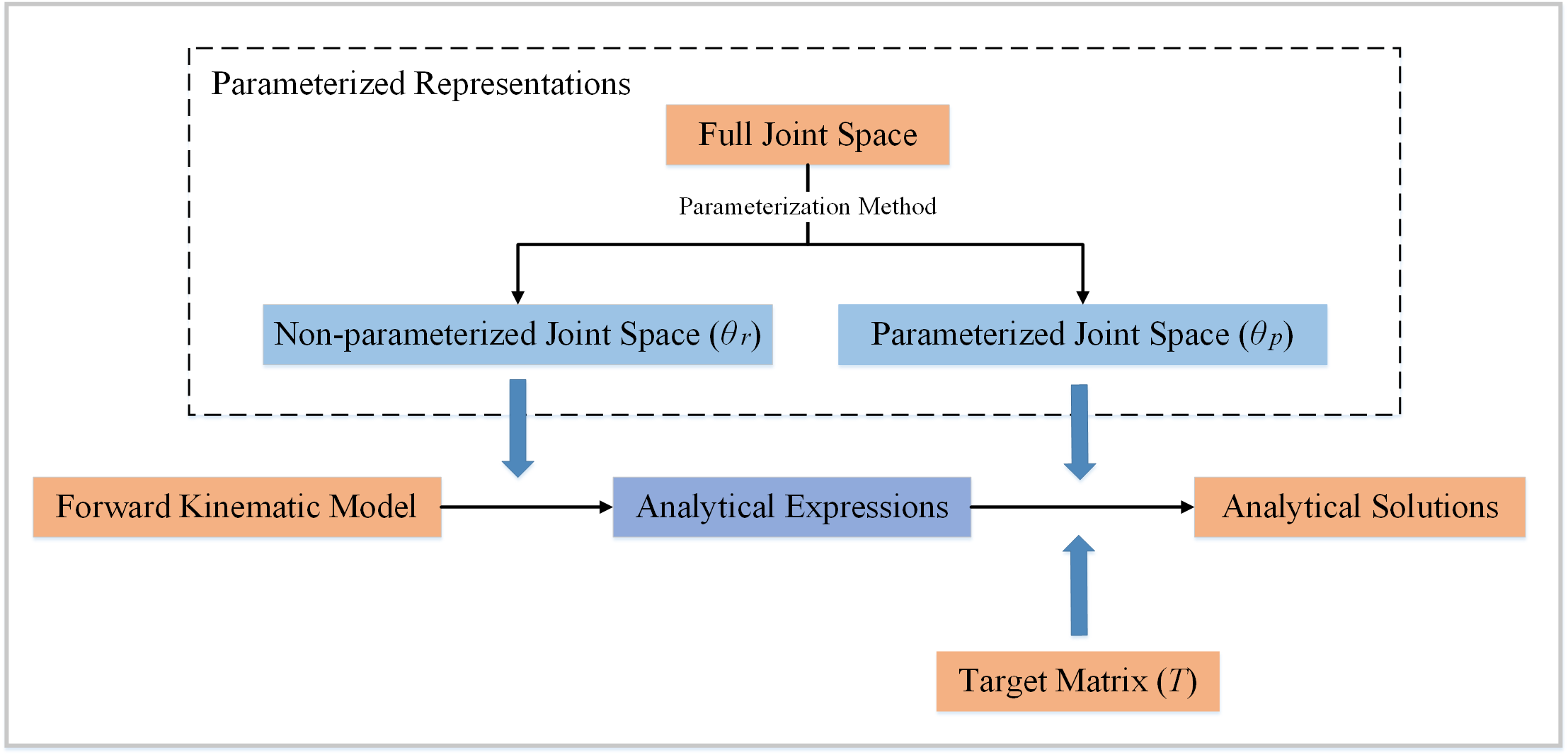
实验室王清锋同学在以前研究的基础上对参数化关节的选择问题进行了深一步研究,探讨了参数化方法的机理,并提出了一种用于快速选取最优参数化表达的方法,所选的最优参数化关节能有效提高搜索算法的性能。相关研究形成论文"Optimal Parameterized Joints Selection to Improve Motion Planning Performance of Redundant Manipulators"已经被"2023 international Conference on Robotics and Automation"(ICRA2023)录用。
International Conference on Robotics and Automation(ICRA)是世界上最大的机器人会议,并且是IEEE机器人与自动化学会的旗舰会议。该会议成立于1984年,每年举行一次。机器人技术、自动化技术、通信领域以及计算机领域的专家会一同参加,通过演讲与展示的方式分享并讨论机器人领域的最新工作。会议创造了一个绝佳的环境,让所有代表沉迷于机器人和自动化领域的学科前沿技术。会议论文集将由IEEE出版社正式出版。